Contexte
Dans un premier temps, nous souhaitons étudier les performances cinématiques.
Nous voulons en particuliers :
- Déterminer la course de l'écrou monté sur la vis pour que le bras du robot ait un débattement de 90° et connaître les paramètres qui la font varier
- Vérifier la constance de la vitesse de rotation du bras sur sa course de 0 à 90° pour une vitesse de rotation moteur fixe
Dans un second temps, plus tard dans l'année, nous mettrons en place un modèle multiphysique complet du robot dans lequel il nous faudra renseigner
- La relation cinématique entrée/sortie dépendant aussi des paramètres géométriques. Il nous faut donc établir ces relations par fermeture géométrique et cinématique
- La relation statique entrée/sortie pour prendre en compte l'action de la gravité en couple résistant à l'arbre moteur. Il nous faut donc réaliser une résolution statique.
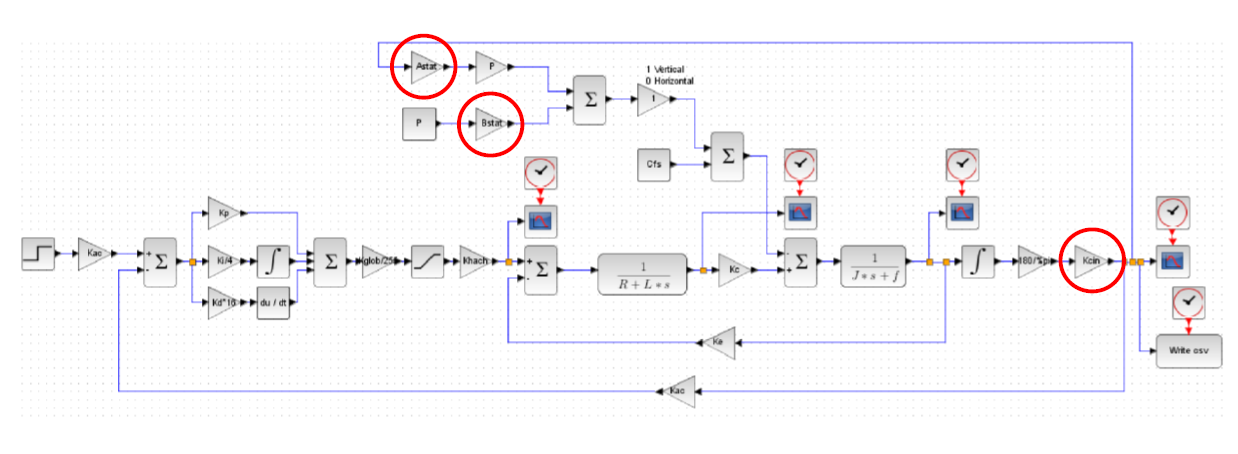
Voici le modèle que nous allons ainsi pouvoir compléter à ce stade de révisions de mécanique :