Contexte
Système complet
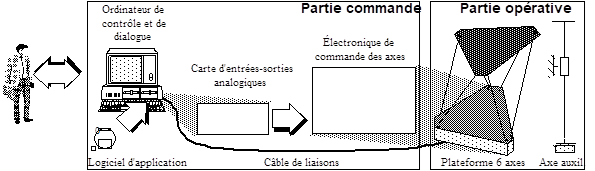
La plate-forme 6 axes ou hexapode est un système pluritechnologique qui permet de positionner le solide embase mobile par rapport au solide embase fixe.
L'entrée des consignes de position s'effectue à partir d'un ordinateur comportant un logiciel de simulation-pilotage, interfacé avec la commande d'axes. La carte d'interfaces analogique-numérique entre l'ordinateur et l'électronique de commande des axes permet à la fois, en “temps réel”:
- de transmettre les consignes calculées par l'ordinateur vers chacun des axes commandés ;
- d'acquérir les différentes mesures de position, de vitesse et de “couple” pour les visualiser.

Plate-forme de STEWART (hexapode) munie de 6 vérins électrique
Chaque vérin ainsi commandé présente une architecture de chaîne fonctionnelle asservie.
Figure 1: Structuration du système plate-forme 6 axes
Dans ce qui suit, on s'intéressera plus particulièrement à un axe seul.
En fonction des applications, les vérins sont soit hydrauliques (fortes charges, fréquence importante) soit électriques
Les applications sont multiples :
- simulateurs de vol (Airbus, Boeing);
- positionneurs pour manipulations en laboratoires
- simulateurs de conduite d'engins et de comportement d'engins spatiaux ;
- simulateurs équestres développé pour l'Ecole Nationale d'Equitation ;
- sièges de cinéma dynamique ( Futuroscope de Poitiers ), salle de cinéma Cinaxe de La Villette, où les spectateurs sont soumis physiquement à des accélérations correspondantes aux scènes qui se déroulent sous leurs yeux ;
- manèges forains ;
- machines outils VARIAX de GIDDINGS et LEWIS , la broche est montée sur la plate-forme mobile.
- ...
Vérin électrique
Un vérin à vis est un mécanisme de transmission de puissance, il permet la transformation du mouvement de rotation de l'arbre moteur en un mouvement de translation de l'axe de sortie du vérin.
Il s'agit ici d'un vérin électrique construit à partir d'une liaison glissière hélicoïdale motorisée par un moto-réducteur électrique à courant continu.
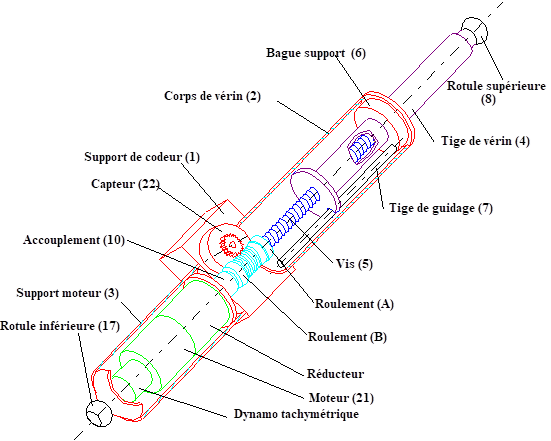
La figure 1 ci-dessous montre les principaux éléments d'un tel vérin électrique :
- La rotation de la vis (5) est obtenue à partir du moto-réducteur (21) ;
- Le moteur est un moteur à courant continu de 5 W environ et tournant à 6000 trs/min en régime nominal ;
- Le réducteur planétaire présente un rapport de réduction de 1/19,4 ;
- Le système vis-écrou comporte une vis en acier au pas de 6,35 mm et un écrou revêtu de téflon ;
- Le contrôle de la position de la tige est réalisée à partir d'un capteur angulaire (22).
Architecture d'un vérin
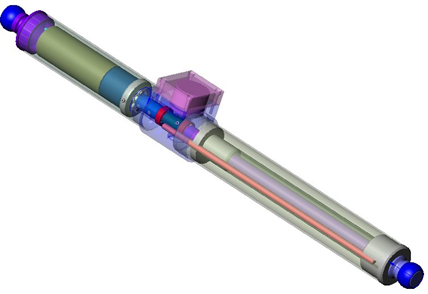
Vérin électrique associé
Ce vérin constitue une chaîne fonctionnelle. Il comporte en effet une partie commande et une partie opérative qui dialoguent ensemble.
Figure 2 : Architecture de la chaîne fonctionnelle
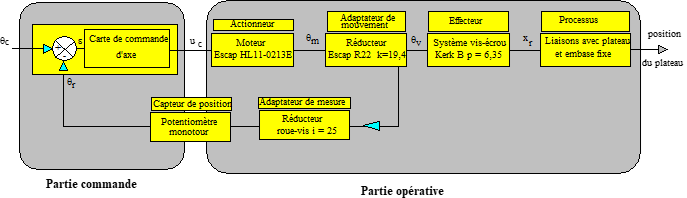
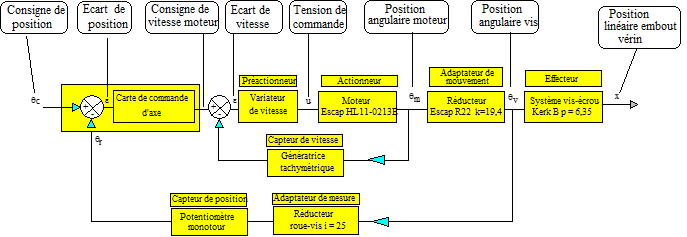
Figure 3 : Chaîne fonctionnelle avec boucle de vitesse
Objectifs
L'analyse des mécanismes (vérin, plateforme 6 axes et simulateur) permettra de comparer les résultats an fonction des solutions technologiques utilisées.
L'étude cinématique du simulateur de conduite permet de se placer dans "un cas simple" d'étude de la plateforme 6 axes.
L'étude sera limitée au mouvement angulaire de tangage, reproduisant par exemple des freinages et accélérations.