Modélisateurs
Chaîne d'information/chaîne d'énergie
Question 1 : Compléter la chaîne d'information/chaîne d'énergie du simulateur de conduite en faisant apparaître sur celui-ci chacun des composants que vous aurez identifiés sur le système réel.
Modélisation et analyse du mécanisme
Question 2: A partir de l'observation du système réel, proposez un graphe des liaisons et un schéma cinématique de la simulateur de conduite.
Question 3: Mener une analyse du mécanisme complète (degré d'hyperstatisme). Commenter vos résultats.
Question 4: Comparer les résultats de vos analyses de mécanisme (plateforme et simulateur)
Simulateur de conduite
Dans la partie suivante, on ne s'intéressera qu'au mouvement de tangage de l'ensemble Σ={siège1+pilote} (rotation autour de ).
Le mouvement de tangage est piloté par les deux vérins qui agissent de manière identique.
Il est alors possible de trouver un modèle plan équivalent du mécanisme. Le vérin est alors appelé vérin équivalent.
La figure correspond à cette modélisation plane équivalente. Le paramétrage est donné sur cette figure. α est l'angle de tangage du siège1 par rapport au châssis. Dans cette étude, on s'intéressera à ce modèle plan.
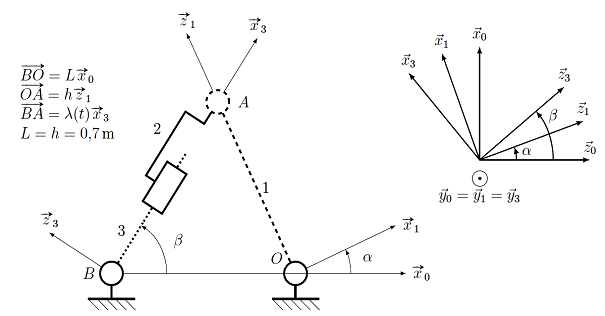
Question 5 : Par une fermeture géométrique, exprimer λ en fonction de α ainsi que des dimensions constantes du système.
Approximation par linéarisation autour du point de fonctionnement
Comme les mouvements ont une faible amplitude autour de la position moyenne, on pose :
\(\lambda=\lambda_0+\Delta\lambda\)
\(\alpha=\alpha_0+\Delta\alpha\)
Question 6 : Déterminer la loi linéaire telle que \(\Delta\lambda=\mu.\Delta\alpha\)
Vous pourrez :
- élever la relation de la Question 7 au carré et éliminer les termes du second ordre
- utiliser la relation 1à la position initiale \((\lambda_0 ,\alpha_0 )\) pour éliminer des termes constants)
Question 7 : Exprimer le paramètre « \(\mu\) » de la relation \(\ddot\lambda=\mu.\ddot\alpha\) existant entre l'accélération commandée \(\ddot\lambda\) du vérin équivalent et l'accélération angulaire \(\ddot\alpha\) du siège.